Produkto




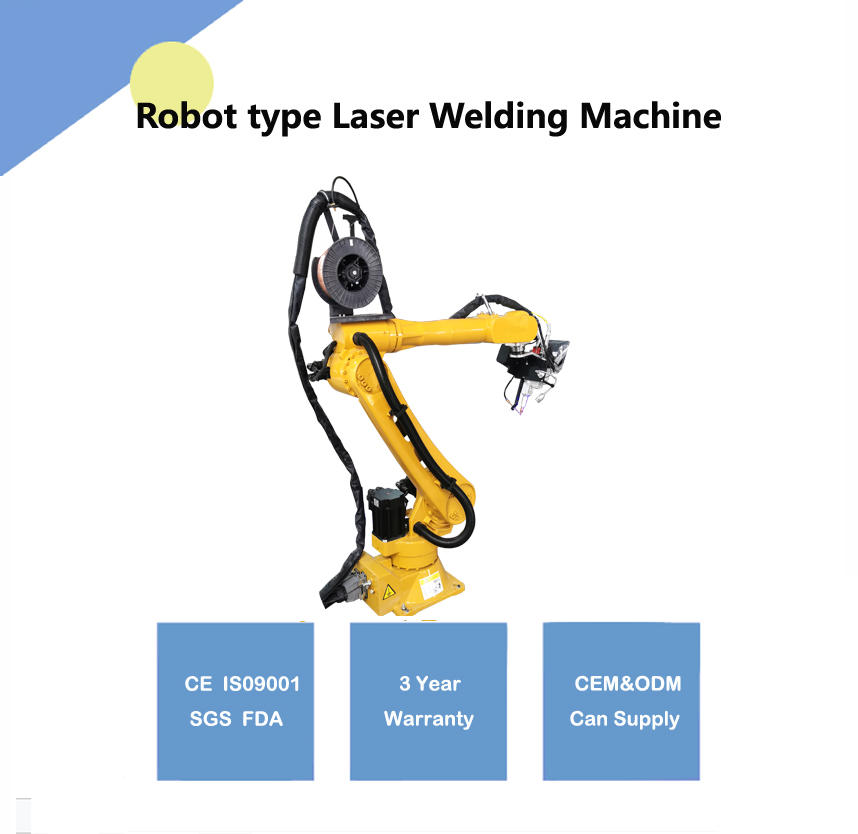
Robota tipo Lasera Veldmaŝino
Produkta Montrado
Teknika parametro
| Ses-aksa roboto | Tuling | Kernaj Komponantoj | Lasera Fonto |
| Uzado | Veldu Metalon | Maks. Elira Potenco | 2000W |
| Aplikebla Materialo | Metalo | CNC Aŭ Ne | Jes |
| Malvarmiga Reĝimo | Akva Malvarmigo | Elektraj kaj Pneŭmatikaj Sistemoj | Schneider |
| Ondolongo | 1090Nm | Lasera Potenco | 1000W/ 1500W/ 2000W |
| Pezo (kg) | 600 kilogramoj | Atestado | Ce, Iso9001 |
| Kernaj Komponantoj | Fibra Lasera Fonto, Fibro, Tenilo Lasera Velda Kapo | Ŝlosilaj Vendargumentoj | Alta Precizeco |
| Funkcio | Lasera Veldado de Metalaj Partoj | Fibra Longo | ≥10m |
| Aplikeblaj Industrioj | Hoteloj, Vestvendejoj, Konstrumaterialvendejoj | Kernaj Komponantoj | Lasera Fonto |
| Reĝimo de Funkciado | Pulsita | Post Garantia Servo | Interreta Subteno |
| Diametro de Fokusa Punkto | 50μm | Maksimuma Kovrado | 1730mm |
| Video Eliranta Inspektado | Provizita | Grafika Formato Subtenataj | Ai, Plt, Dxf, Dwg, Dxp |
| Originloko | Jinan, Shandong-provinco | Garantia Tempo | 3 Jaroj |
Robota brako
La robota akso povas esti rotacia akso aŭ translacia akso, kaj la funkciado de la akso estas determinita de la mekanika strukturo. La robota akso estas dividita en la movakson de la robota korpo kaj la eksteran akson. La ekstera ŝafto estas dividita en glittablon kaj poziciilon. Krom se alie specifite, la robota akso rilatas al la movakso de la robota korpo.
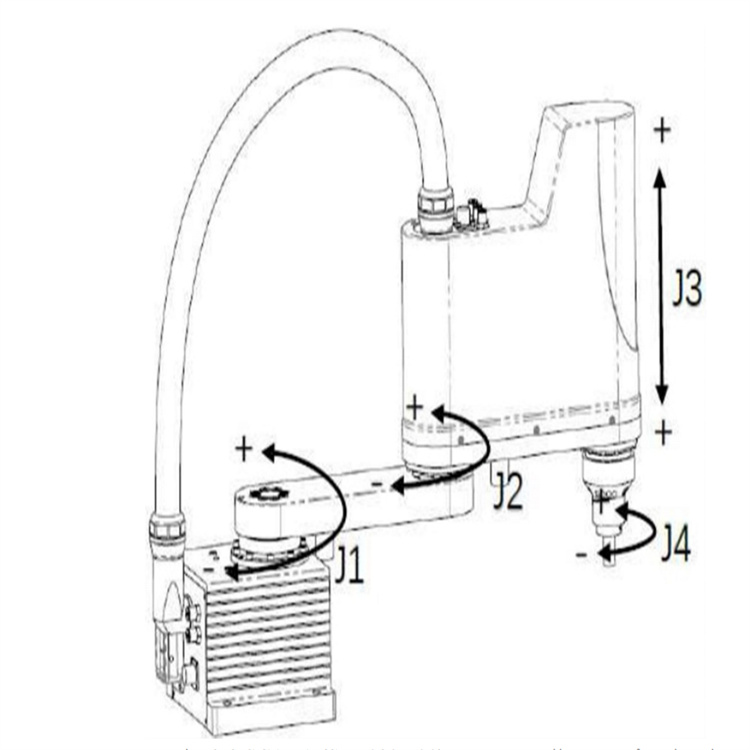
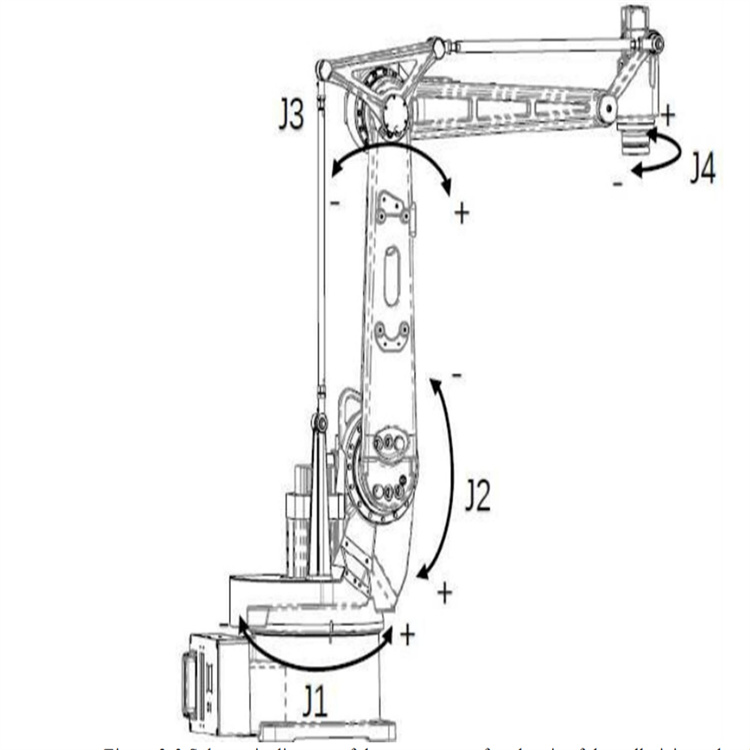
Turing-robotoj estas dividitaj en tri tipojn de industriaj robotoj:
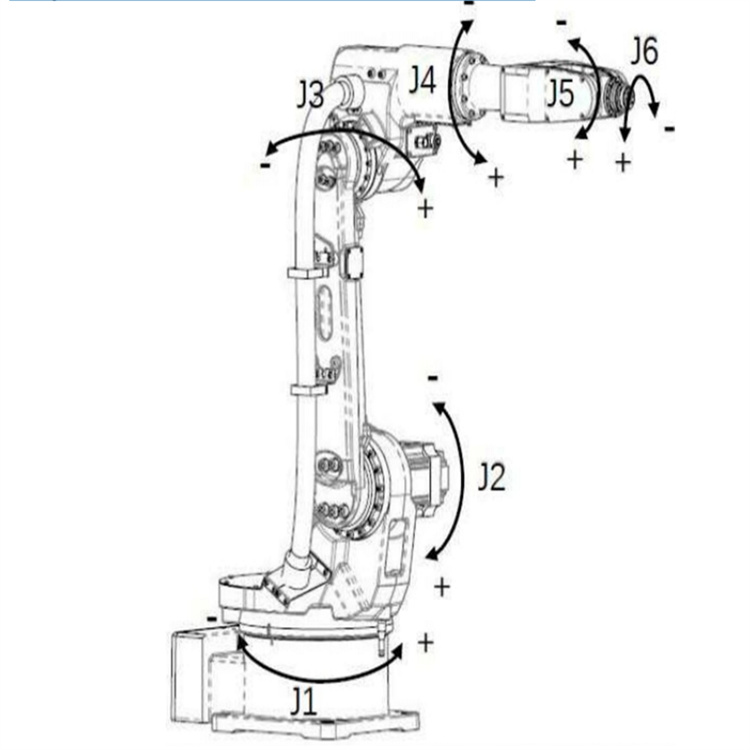
Industria ses-aksa roboto: inkluzive de ses rotaciaj aksoj
SCARA: enhavas tri rotaciajn aksojn kaj unu translacian akson
Palediga manipulilo: inkluzive de kvar rotaciantaj ŝaftoj La artika moviĝo de la roboto estas montrita en la figuro.
Apliko de robota veldmaŝino
1. Kampo de Maŝina Fabrikado
Kun la intensiĝo de veldado en la maŝinfabrikada industrio, la veldado havas esence malbonajn laborkondiĉojn kaj grandan varmoradiadon, kio estas tre danĝera profesio. Ekzistas ankaŭ multaj grandskalaj ekipaĵoj en maŝinfabrikado, kio ankaŭ pliigas la malfacilecon de veldado. Veldroboto estas aŭtomata mekanika ekipaĵo engaĝita en veldado, kiu liberigas la laborintensecon de laboristoj kaj helpas plibonigi la nivelon de aŭtomatigo en la kampo de maŝinfabrikado.
2. Aŭtomobiloj kaj aŭtopartoj:
En la lastaj jaroj, por kontentigi la bezonojn de la publiko, la aŭtomobila industrio montris diversigitan disvolviĝon. Tradicia veldado ne povas kontentigi la altajn veldajn postulojn de aŭtomobila kaj aŭtoparta fabrikado. La velda junto estas bela kaj firma. En multaj modernaj aŭtomobilaj produktadlaborejoj, oni formis veldajn robotajn muntoliniojn.
3.Elektronika ekipaĵo:
La kampo de elektronika ekipaĵo havas relative altajn postulojn pri veldkvalito. Kun la kreskanta postulo je elektronika ekipaĵo en la socio, elektronika ekipaĵo ankaŭ alfrontas severajn defiojn dum ĝi rapide disvolviĝas. Veldrobotoj povas stabiligi la veldkvaliton samtempe certigante produktadan efikecon. La preciza veldado de la ekipaĵo estas tri- ĝis kvar-oble pli alta ol tiu de mana laboro.
4. Aerospaca:
En la strukturo de la aviadilo, estas preskaŭ 1000 veldaj komponantoj de la korpo, kaj preskaŭ 10 000 partoj estas implikitaj. Plej multaj el la gravaj ŝarĝoportantaj komponantoj de la aviadilo uzas velditajn komponantojn. La aviadilkorpo estas sub granda premo dum flugo, do la veldaj postuloj estas relative striktaj, kaj la veldroboto povas flekseble agordi la veldajn parametrojn per la aŭtomata velda juntospura teknologio por precize veldi la aviadilstrukturon.
Prizorgado de maŝino
- Mekanismo de dratnutrado. Inkluzive ĉu la dratnutra distanco estas normala, ĉu la dratnutra tubo estas difektita, kaj ĉu estas nenormala alarmo; Ĉu la gasfluo estas normala; Ĉu la sekureca protekta sistemo de la veldtorĉo estas normala. (Estas malpermesite fermi la veldtorĉon por sekureca protekta laboro); Ĉu la akvocirkulada sistemo funkcias normale; Testo de TCP (estas rekomendinde kompili testprogramon kaj ruli ĝin post ĉiu ŝanĝo)
2. Semajna inspektado kaj bontenado
1. Frotu ĉiun akson de la roboto; Kontrolu la precizecon de la TCP; Kontrolu la restan oleonivelon; Kontrolu ĉu la nula pozicio de ĉiu akso de la roboto estas preciza; Purigu la filtrilon malantaŭ la akvocisterno de la veldmaŝino; Purigu la filtrilon ĉe la premaera enirejo; Purigu la malpuraĵojn ĉe la ajuto de la veldtorĉo por eviti ŝtopi la akvocirkuladon; Purigu la drat-nutran mekanismon, inkluzive de la drat-nutra rado, la dratpremrado kaj la drat-gvidtubo; Kontrolu ĉu la hosfasko kaj la gviddrata hoso estas difektitaj aŭ rompitaj. (Estas rekomendinde forigi la tutan hosfaskon kaj purigi ĝin per premaero); Kontrolu ĉu la sekureca protekta sistemo de la veldtorĉo funkcias normala kaj ĉu la ekstera krizhaltiga butono funkcias normala.